Takahiro Otani
研究内容
進化的計算手法を用いたシステム最適化に関する研究 (2005年~)
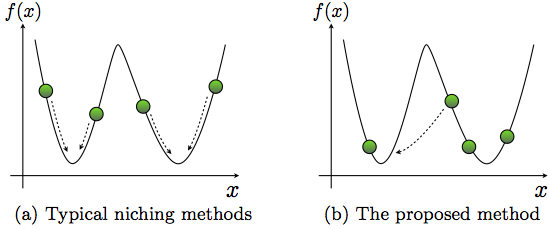
孤立個体に基づく変異操作を導入したDifferential Evolutionによる多峰性関数最適化
Differential Evolutionは実数値最適化アルゴリズムの一種であり,簡単に実装でき,かつ高い性能を示す手法として注目されています.本研究ではこの手法に孤立個体に基づく変異操作を導入することで,多峰性関数の最適化に対応しました.
- Takahiro Otani, Reiji Suzuki, Takaya Arita, " DE/isolated/1: A new mutation operator for multimodal optimization with differential evolution, " International Journal of Machine Learning and Cybernetics (accepted).
- Takahiro Otani, Reiji Suzuki, Takaya Arita, " DE/isolated/1: A new mutation operator for multimodal optimization with differential evolution, " The 24th Australasian Joint Conference on Artificial Intelligence (AI2011), 2011 (accepted).
ACOにおける探索バイアスを抑制する学習規則の開発
探索バイアスとは,特定の特徴を持った解が多く発生する現象であり,ACOの性能低下の原因となります.本研究では,この現象を抑制しながら探索を行うことが出来るパラメータ学習規則を開発しました.
- 大谷隆浩, 越野亮, 木村春彦, " アントコロニー最適化におけるモデル化に依存する探索バイアスの抑制, " 情報処理学会論文誌, vol.51, no.5, pp.1273-1282, 2010.
Ant Colony Optimizationを用いた学校時間割の自動編成
大規模な学校では時間割の編成は極めて困難な作業であり,その自動化が望まれています.本研究ではこの問題を解くために,制約伝播に基づくアルゴリズムであるReally Full Look-ahead Greedyと,群知能アルゴリズムのAnt Colony Optimizationを組み合わせた手法を開発しております.
- 越野亮, 大谷隆浩, 木村春彦, " Really-Full-LookaheadとACOの統合による学校時間割自動編成システム, " 第71回情報処理学会全国大会, 2009.
生産スケジューリング
生産スケジューリングにおいては,様々な要件を考慮しながら効率の良い計画を提案する必要があります. 本研究ではスケジューリング・ロジックとして広く用いられているシミュレーションによるスケジューリング手法をベースとして, 群知能アルゴリズムであるParticle Swarm Optimization,および自動プログラミング手法の遺伝的ネットワークプログラミングの適用を試みております.
- Takahiro Otani, Makoto Koshino, Haruhiko Kimura, " Generating dispatching rules for simulation-based scheduling by means of Genetic Network Programming," Proceedings of the 9th Asia Pasific Industrial Engineering & Management Systems Conference, pp.1895-1900, 2008.
- 大谷隆浩, 越野亮, " PSOを用いたシミュレーションベース・スケジューリング, " 日本経営工学会北陸支部 学生による研究発表会, 2008. (発表賞)
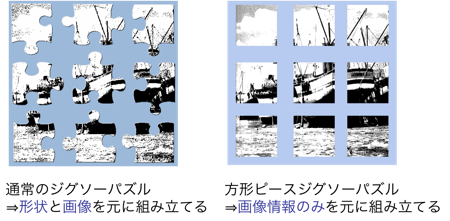
Ant Colony Optimizationを用いた方形ピースジグソーパズル
方形ピースジグソーパズル問題はピースの形状が全て方形となっているジグソーパズルであり,表面に描かれている画像情報のみをもとにパズルを組み立てる問題です. これまでに遺伝的アルゴリズムを用いた手法が提案されていますが,本研究ではAnt Colony Optimizationを適用することで精度の向上に成功しました.
- 大谷隆浩, 越野亮, 白山正敏, " 方形ピースジグソーパズル問題におけるアントコロニー最適化の適用, " 電子情報通信学会論文誌D, vol.J90-D, No.5, pp.1275-1281, 2007.
- 大谷隆浩, 越野亮, 白山正敏, " 方形ピースジグソーパズル問題におけるACOの適用, " 平成18年度電気関係学会北陸支部連合大会, 2006. (優秀論文発表賞)
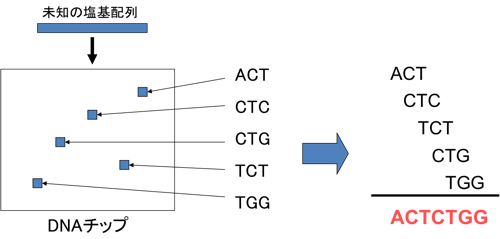
Ant Colony Optimizationを用いたDNA配列決定
2003年にヒトゲノムの塩基配列が解読されてからもDNA配列決定手法は日々改善され,更なる速度・精度の向上が試みられています. 本研究では配列決定手法の一種であるハイブリッド形成による配列決定 (Sequencing by Hybridization) に対して, 群知能アルゴリズムの一種であるAnt Colony Optimizationを適用することで, 従来手法に比べて大幅な精度向上に成功しました.
- 越野亮, 大谷隆浩, 高大輔, 白山正敏, " DNA配列決定におけるMAX-MIN Ant Systemの適用とその改良, " 電子情報通信学会論文誌D, vol.J89-D, No5, pp.911-918, 2006.
- 大谷隆浩, 越野亮, 白山正敏, " DNA配列決定問題におけるアントコロニー最適化の適用, " 北陸地区学生による研究発表会, 2006.
- 大谷隆浩, 越野亮, 白山正敏, " DNA配列決定問題におけるアントコロニー最適化の適用, " 平成17年度電気関係学会北陸支部連合大会, 2005. (優秀論文発表賞)
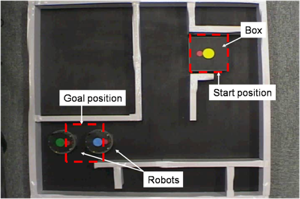
小型移動ロボットの協調行動に関する研究 (2007年~)
複数のロボットが協調して行動することにより,単一のロボットに比べてより高度な作業の実現が期待できます.そのため,複数のロボット系における経路計画問題を解くことは非常に重要であると考えられます. 本研究では経路計画手法の一種であるRapidly exploring Random Treesを用いて,2台の小型移動ロボットe-puckによる協調的な箱押し行動の計画に成功しました.

- Takahiro Otani and Makoto Koshino, " Applying a Path Planner based on RRT to Cooperative Multi-robot Box-pushing, " Artificial Life and Robotics, Vol.13, No.2, pp.418-422, 2009.
- Takahiro Otani, Makoto Koshino, " Applying a Path Planner based on RRT to Cooperative Multi-robot Box-pushing, " AROB 13th '08, pp.359-362, 2008.
- 大谷隆浩, 越野亮, " 複数の小型移動ロボットによる協調的箱押し行動の経路計画, " 第70回情報処理学会全国大会, 2008.